ربات بازوی چهار درجه آزادی
ربات بازو یا Manipulator
این رباتها از چند بازوی پشت سر هم تشکیل شدهاند. این بازوها با اتصالات دورانی یا کشویی به یکدیگر متصل میشوند. برای حرکت هریک از این قطعات از انواع موتور سرو یا استپ استفاده میشود.
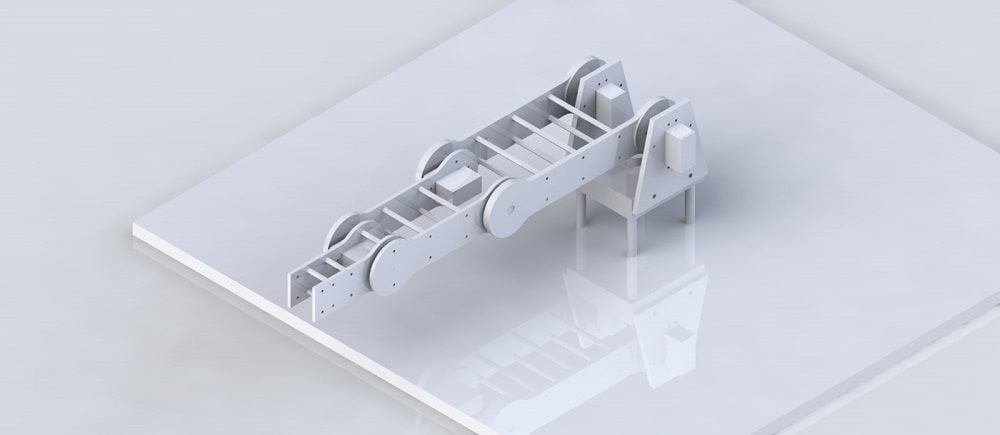
پروژهای که در این پست تصاویرش را مشاهده میکنید، مربوط به دوران کارشناسی در دانشگاه علامه مجلسی اصفهان است. این ربات از سه مفصل دورانی هم راستا و یک محور دورانی عمود بر آنها در اولین اتصال تشکیل شدهاست.